Anna Syberfeldt
Institutionen för ingenjörsvetenskap
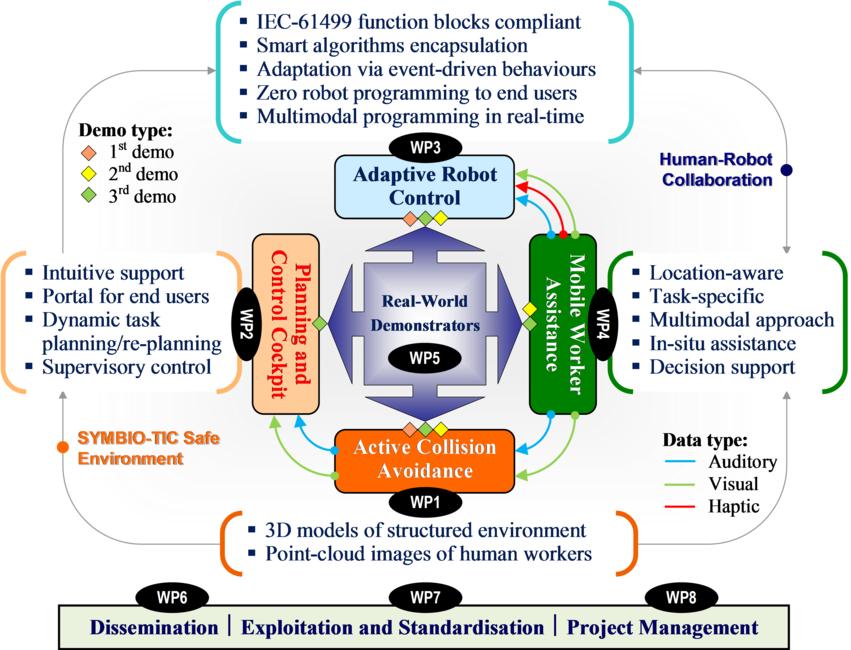
Forskningsprojektet syftar till att utveckla en lösning för en ny arbetsmiljö där samarbetet mellan människa arbetare och robotar kan ske och innebära betydande fördelar för robot ovilliga industrier.
En ny generation av industrirobotar har börjat introducerats på marknaden där syftet är att de ska kunna samarbeta med människor. Projektets mål är att utveckla monteringssystem baserade på samarbete mellan människor och robotar och kommer bland annat att fokusera på frågeställningarna:
Högskolan i Skövde ansvarar för de tre demonstratorer som kommer att byggas i Spanien, Tyskland och Sverige. Den största demonstratorn i projektet byggs i samarbete med Volvo Cars i Skövde för att påvisa projektets resultat.
Projektet är uppdelat i åtta olika arbetspaket och Högskolan i Skövde är ansvarig för arbetspaketet WP5, som syftar till att testa och validera den SYMBIO-TIC koncept och lösningar i form av människa-robot samverkande montering.



Proceedings 2022 IEEE International Conference on e-Business Engineering ICEBE 2022: 14–16 October 2022 Bournemouth, United Kingdom
2022. Konferensbidrag. https://doi.org/10.1109/ICEBE55470.2022.00021

