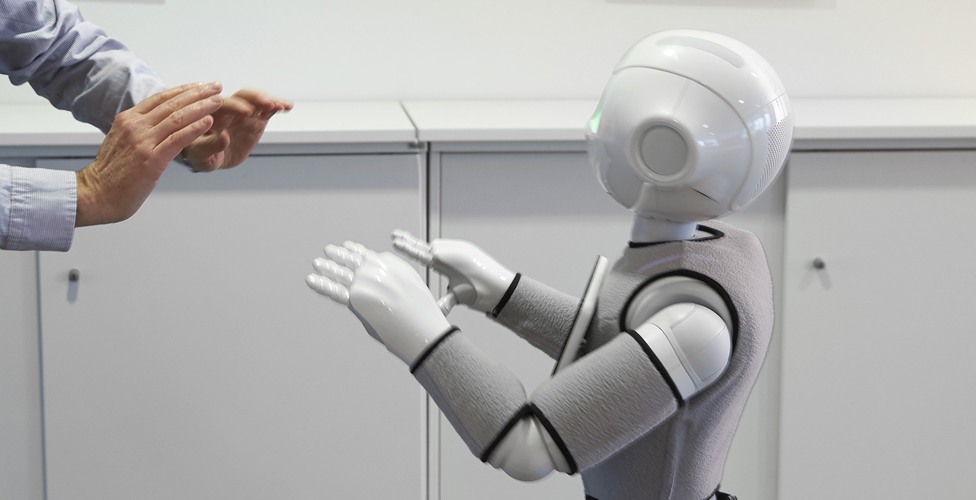
Människor är bra på att uppfatta sociala rörelser och gester. Men hur duktiga är dagens robotar? Svaret är lika bra under begränsade och enkla situationer. Det visar ny forskning från Högskolan i Skövde.
Paul Hemeren är docent i kognitionsvetenskap vid Högskolan i Skövde. I sin senaste publikation presenterar han forskning där han har jämfört människors och robotars eller så kallade maskininlärningsprograms förmåga att uppfatta några sociala gester. Hur bra är människor respektive robotar på att skilja mellan sociala och icke-sociala gester? Svaret är att de är i stort sett lika bra på den uppgiften.
– Att maskininlärningstekniker så att säga ser skillnader mellan sociala och icke-sociala gester på samma nivå som människan är det viktigaste resultatet från studien eftersom det ger en möjlig grund för robotar och människor att interagera socialt, säger Paul Hemeren.
I studien har människor och fyra olika maskininlärningstekniker fått studera 30 olika gester, slumpmässigt utvalda från ett bibliotek av totalt 105 datoranimerade rörelser. Rörelserna kunde till exempel vara att göra en high five, klippa med en sax, eller skala en banan. Uppgiften för deltagarna i studien var sedan att beskriva gesten och ange om den var social eller icke-social. Detta var något som både människorna och maskininlärningsteknikerna behärskade.
Sociala robotar skapar tillit
Robotar används i allt större utsträckning i sociala sammanhang för att umgås och interagera med människor. I vilken utsträckning robotar behöver visa social kompetens beror förstås på i vilket sammanhang de används. Men när det kommer till social robotik är gester en potentiellt kritisk aspekt av icke-språklig social interaktion där både roboten och människan övervakar och påverkar varandra.
Om robotarna saknar förmåga att reagera på sociala rörelser eller inte klarar av att tolka de sociala signaler som människor använder uppstår en brist i kommunikationen men när robotar blir allt bättre på att förstå social kommunikation ökar användningsområdena för robotar men även tillit till tekniken.
– Det är en viktig förutsättning för att robotarna ska komma till användning och nytta inom till exempel industrin och sjukvårdsområden, säger Paul Hemeren.
Tillämpningar inom trafiksäkerhet
Paul Hemeren menar att studien ger en bra grund för fortsatta studier kring hur robotar kan utvecklas för att än bättre interagera med människor. Kan början av en gest användas för att avgöra intensionen? Han och hans forskarteam kommer nu fortsätta arbeta med hur rörelseinformationen förser oss och intelligenta system med en uppfattning om hur andra personer och robotar försöker kommunicera med oss.
– Vi tittar nu på hur mer avancerade system i bilar kan uppfatta intentioner i trafiken. Om vi till exempel kan se vilka signaler eller gester en fotgängare vid ett övergångsställe skickar ut innan fotgängaren tar steget ut i gatan skulle dessa signaler kunna användas för att varna en bilförare, säger Paul Hemeren.
Forskningen presenterad i publikationen är finansierad av KK-stiftelsen.
Läs mer
Publikationen: Kinematic-Based Classification of Social Gestures and Grasping by Humans and Machine Learning Techniques
Magkänsla, erfarenhet eller fördom – det är intuition
Skövdeforskare och ärkebiskopen i samtal om AI
